Hey guys
today I want to show you my newest project. It is an arduino based Robot which stays inside my own room!
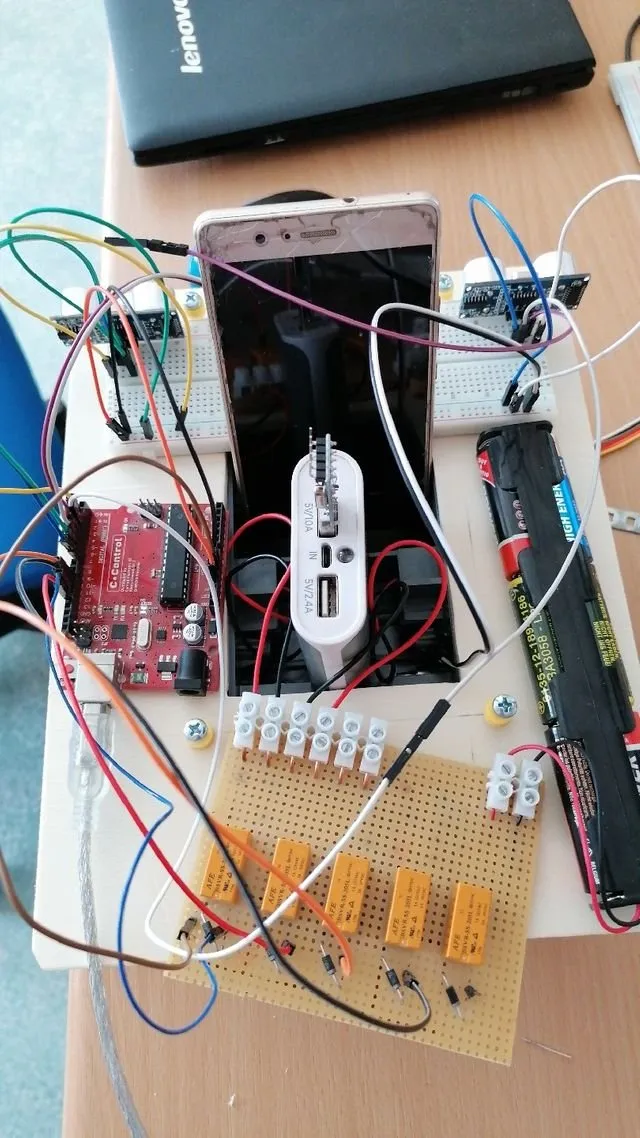
I am using the Arduino Uno as the main controller. It controls the two motors and 3 ultrasonic distance measurement sensors to prevent crashing into walls. I am using my old mobile phone as the camera and a raspberry pi to process it. The software I wrote by myself in python with opencv and numpy. The communication between my pi and the arduino is based on the nodemcu (ESP-12, which is 5v tolerant). It talks via serial communication and TCP.
An image of my litte robot:
My first tries
As I finished the pi software and the commands were send to the arduino, I connected a battery and started everything. But I did terrible mistakes why it crashed many times against my walls. That is the reason why a few jumper cables lost their connections and I had to refigure out which cables goes with to the connectors. Finally I had done.
Next I wrote the arduino code a bit different so it will stop early. This fixed the problem with crashing into walls.
Finally I replugged the battery and now it avoids my walls.
But I realised that the process to classify the image takes to long. So it went outside of my room and it nearly fall down the stairs!
Now I have to improve my pi code to decrease the processing time. Because today it is Mother's Day I visit my mom and can not work on the project. Later I will do it!
I hope you enjoyed the story of my beginning project!
Christopher