Hello there Steemit! Today I'm posting about what we've been up to recently in robotics again. The robot I will be showing you today is the one that we used for our competition earlier in the year.
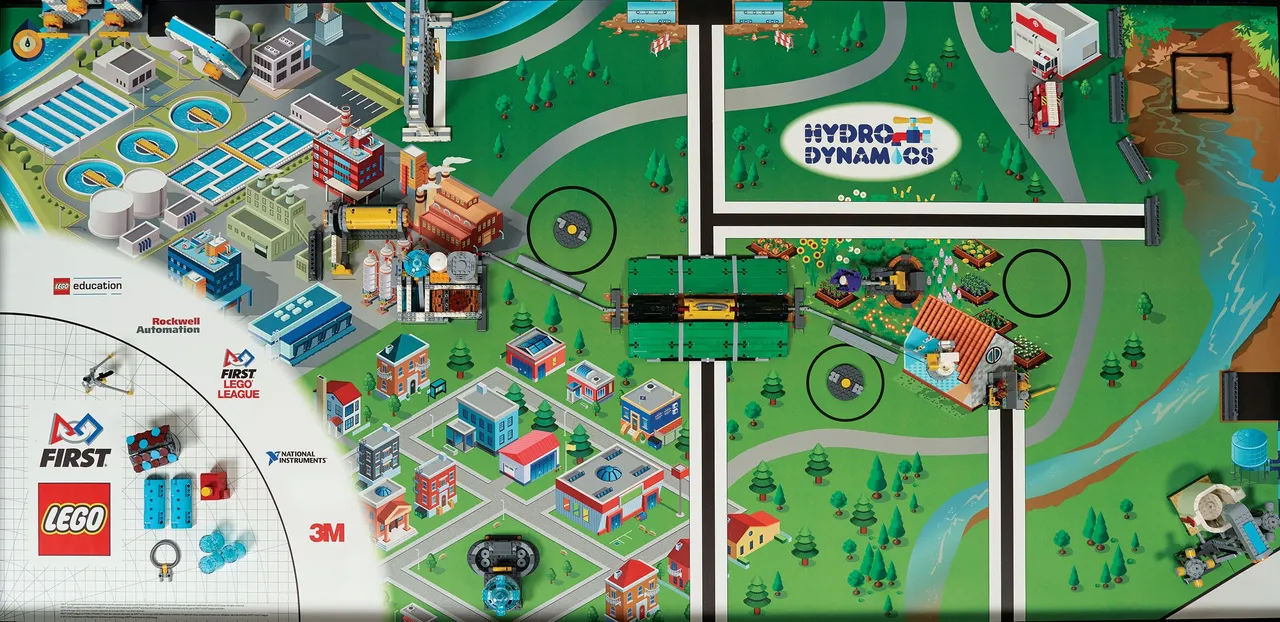
As mentioned in my previous post, my team and I participate in the FLL (First Lego League) competitions. In these competitions, we need to build a robot that completes a number of tasks to gather the most points before the time ends. We are given 2 minutes 30 seconds to complete as many as possible. If we touch the robot once it has left base, a small circle in the bottom corner of the map, we are given a 5 point deduction and lose any points we would have gained if we brought a piece back to base. The robot cannot be made to intentionally destroy the board, and must not be more than 12 inches tall. It can be as wide or long as you like as long as it fits in base.

source
source

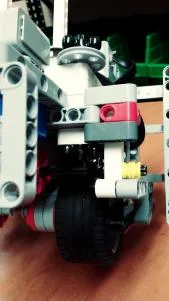
In the middle of the robot, there is a Gyro Sensor which is used for almost all of our programming. It allows us to get exact movements of the robot and make sure that the robot runs perfectly straight. On the top left and right of the robot are the gears that I described earlier. The handle is the blue in the middle, and the brain, the EV3 brick we use, is attached to the back. We used frames to create the part that holds the attachments, so we can easily slip them on and off. The attachment that I mentioned earlier was a square about the same size as the robot, but slightly bigger so that it can attach to the robot with parts that stick out. On it was a container that held the "water" that was used to complete a challenge for 30 points, a one-way hook to grab a "broken pipe" for 30 points, and an attachable piece that held a "tripod" in place to get either 15 and 20 points. This was the first attachment that we used and allowed us to get up to 80 points in the first 25 seconds of the match. The robots design is key to this because the attachment only fits on this exact robot.



Of course we can't forget about our core values! Without these, the FLL concept would not be the same!
- We are a team
- We do the work to find the answers together with our coaches.
- Nobody has all of the answers: We work together.
- We honor the spirit of friendly competition.
- What we discover is more important than what we win
- We share our experiences with others.
- We display gracious professionalism and coopertiton (cooperative competition)
- We have fun!